堆结构
模型
优先队列 (priority queue) 的 ADT 与 queue 类似,它们都提供了基本的 enqueue 与
dequeue 操作。但是 priority queue 可以在 dequeue 时将数据按照一定顺序弹出队列,而不是 FIFO。我们这里主要讨论每次出队最小的元素 (即 delete_min),如果你希望进行其他一些有规范的操作,方法与这类似。
显然 priority queue 有一个朴素解,那就是在每次 delete_min 时遍历整个存储单元,找到最小的元素并删除,其时间复杂度 \(\mathcal{O}(N)\) ,当然插入元素的时间复杂度会好很多,只需要 \(\mathcal{O}(1)\) 。当然你也可以将其反过来,在插入时就找到最小的元素。
显然这是无法接受的,即使是利用前几篇中介绍过的 AVL 树都可以将其时间复杂度压缩到 \(\mathcal{O}(\log_{}{N})\) 。不过这有点太过分了,平衡 BST 的很多操作可能是用不上的,而且为了优先队列再实现一个平衡树实在是太难为人了。
我们将要介绍的工具叫做 二叉堆 (binary heap),用以实现有限队列。但是需要注意的是, 堆 (heap) 这里指的是一种数据结构,而非操作系统中用以分配动态内存的地方。
二叉堆
结构性质
binary heap 是一棵被完全填满的二叉树,或者说是一棵 complete binary tree。由于 complete binary tree 的排列十分有规律,因此我们可以将其转化为数组,不再需要链来链接它。

对于数组任一位置 \(i\) 上的元素,其左右儿子分别在在位置 \(2i + 1\) 和 \(2i +2\) 上,而它的父亲则在位置 \(\lfloor(i - 1)/2\rfloor\) 上。当然如果根从 \(1\) 开始,那么位置 \(i\) 上元素的左右儿子的位置分别为 \(2i\) 和 \(2i + 1\) ,而父亲的位置是 \(\lfloor i/2 \rfloor\) 。以下未说明的情况,我们将 1 作为 root 的下标。
堆序性质
保证 heap 可以快速执行的是 堆序性质 (heap-order property)。我们希望找到的是最小的元素,因此最小的元素在根上,而它的任一子树也是 heap,那么可以得出任一结点小于其所有后裔,这种结构被称为 小顶堆 (min heap);而相反的,任一结点大于其所有后裔,则被称为 大顶堆 (max heap)。

heap-order 保证我们可以在 \(\mathcal{O}(1)\) 的时间复杂度内找到想要的元素。
堆的操作
如果我们希望对 heap 做一些操作,可能会破坏 heap-order property,所以我们应该保证无论如何操作,都可以恢复其性质。
binary heap 的插入操作
要在堆中插入一个元素,我们首先需要在尾部建立一个空穴,用以存放元素。为了不破坏 heap-order,我们比较插入元素与其父结点元素:如果元素可以放入空穴则插入完成,否则将父结点放入空穴,空穴转变为了父结点,自底向上递归直到元素插入。

这个过程被称为 上滤 (percolate up)。percolate up 的最坏时间复杂度是
\(\mathcal{O}(\log_{}{N})\) ,这是需要 percolate up 到 root。但是平均来看,
percolate up 的结束要早得多,平均需要 2.607 次比较,因此元素平均上移 1.607
层,平均时间复杂度 \(\mathcal{O}(1)\) 。
这里给出向堆中插入的元素的代码。有一个小技巧,交换元素需要三条赋值语句,如果 percolate up n,则需要 \(3n\) 条赋值语句,采用直接赋值覆盖的方法,则只需要 \(n + 1\) 次赋值。
template <class Comparable>
void insert(heap& h, Comparable x) {
int hole = ++h.cur_size;
while (hole > 1 && x < h[hole / 2]) {
h[hole] = h[hole / 2];
hole /= 2;
}
h[hole] = x;
}binary heap 的移除操作
找出目标元素显然简单的多,因为 root 就是目标,但是如何将其从 heap 中移除。我们依然采取建立空穴的方法,只不过这次空穴建立在了 root。
我们进行与 percolate up 类似的操作,只不过这次从上向下进行,这被称为 下滤 (percolate down)。我们从 root 出发,将孩子中的较小元素移动到空穴,并继续向下找去,直到空穴成为 leaf。到达 leaf 后,我们将最后一个结点值赋值给空穴,并删除最后一个结点,这样就能让 heap 的长度减一。

在实现时我们需要注意一个细节,当 heap 中元素的数量为偶数时,有的结点可能只有一个孩子。有一个小技巧,可以将一个大于任何 heap 元素的标识放在末尾,这样我们可以假设所有结点都有两个孩子,当然请小心处理。percolate down 的最坏与平均复杂度都是 \(\mathcal{O}(\log_{}{N})\) 的。
void erase(heap& h) {
auto tmp = h[h.cur_size--];
int hole = 1;
while (hole * 2 <= h.cur_size) {
int child = hole * 2;
if (child != h.cur_size && h[child + 1] < h[child]) {
++child;
}
if (h[child] < tmp) {
h[hole] = h[child];
} else {
break;
}
}
h[hole] = tmp;
}binary heap 的其他操作
可以明确,min heap 中对查找最大元素并没有帮助,最大的元素在 leaf 上,但有半数的元素都是 leaf。在 heap 中我们不得不进行线性查找才能获取到特定元素。
当然我们还可以在 heap 上进行其他操作。
decrease_key(p, delta):将位置 p 的元素减小 \(\delta\) 。这有可能破坏 heap-order,因此需要对其进行 percolate up。increase_key(p, delta):将位置 p 的元素增加 \(\delta\) 。这有可能破坏 heap-order,因此需要对其进行 percolate down。remove(p):将位置 p 的元素移除。build_heap:通过原始集合构建一个堆,这个过程也被称为 堆化 (heapify)。这个过程的平均运行时间是 \(\mathcal{O}(N)\) 的,最坏时间复杂度是 \(\mathcal{O}(N\log_{}{N})\) 的。
d 堆
binary heap 的实现简单,因此大部分时候 priority queue 优先使用其作为实现。d 堆 (d-ary heap) 是 binary heap 的简单推广,其每个结点总有 d 个孩子。所以简单的说, binary heap 就是一种 2-堆。
当然我们可以继续使用一个数组表示 d-ary heap,但是找出 node 和 parent 的乘法和除法都有个因子 d,因此更好的做法是使用 \(d = 2^{x}\) ,这样可以使用位运算加速除法过程。
一个显而易见的结论,当 d 增大时,其深度也将减少,因此 insert 时间复杂度是 \(\mathcal{O}(\log_{d}{N})\) ,但 erase 操作就会费时很多,erase 的时间复杂度是 \(\mathcal{O}(d\log_{d}{N})\) 。当然在 insert 远多于 erase 的算法中,d-ary heap 可以有效降低时间复杂度。不过实践证明,4-ary heap 可以胜过 binary heap。

左式堆
设计一种像 binary heap 又能以 \(\mathcal{O}(N)\) 的时间复杂度处理 merge,并且只使用一个数组的堆结构是困难的。因此大部分需要有效合并的数据结构都是链式的,但这可能导致其他操作变慢。
左式堆 (leftist heap) 像 binary heap 那样既有结构性质又有 heap-order property,不过所有的堆其 heap-order property 都是一样的,所以我们只需要关注它的结构性质。 leftist heap 也是二叉树,但区别是:leftist heap 并不是理想平衡的,而是趋于非常不平衡的。
左式堆的性质
将任一结点 X 的 零路径长 (null path length) \(npl(X)\) 或 \(s(X)\) 定义为从 X 到一个布局有两个孩子的结点的最短路径长。因此具有 \(degree = 0 \lor 1\) 的结点 \(npl = 1\) ,而 \(npl(null) = 0\) ,任意结点的 NPL 比其所有孩子的 NPL 的最小值加 1。对于 heap 中的每一个结点 X,左孩子的 NPL 至少与右孩子的 NPL 相等,这样树的结构更偏向于向左子树添加深度,因此称之为 leftist heap。

在右路径上有 r 个结点的左式树必然至少有 \(2^{r} - 1\) 个结点,而 N 个结点的左式树有一条右路径最多含有 \(\lfloor\log_{}{(N+1)}\rfloor\) 个结点。在左式堆上的操作,将所有工作都放在右路径上进行,以保证树不会过深。
左式堆的操作
leftist heap 中的基本操作是合并,而插入、移除是合并的特殊情形。插入元素可以看作是一个大堆和一个只有根结点的堆进行合并;移除元素时我们将会得到两个堆,将这两个堆进行合并即可得到新的 heap。
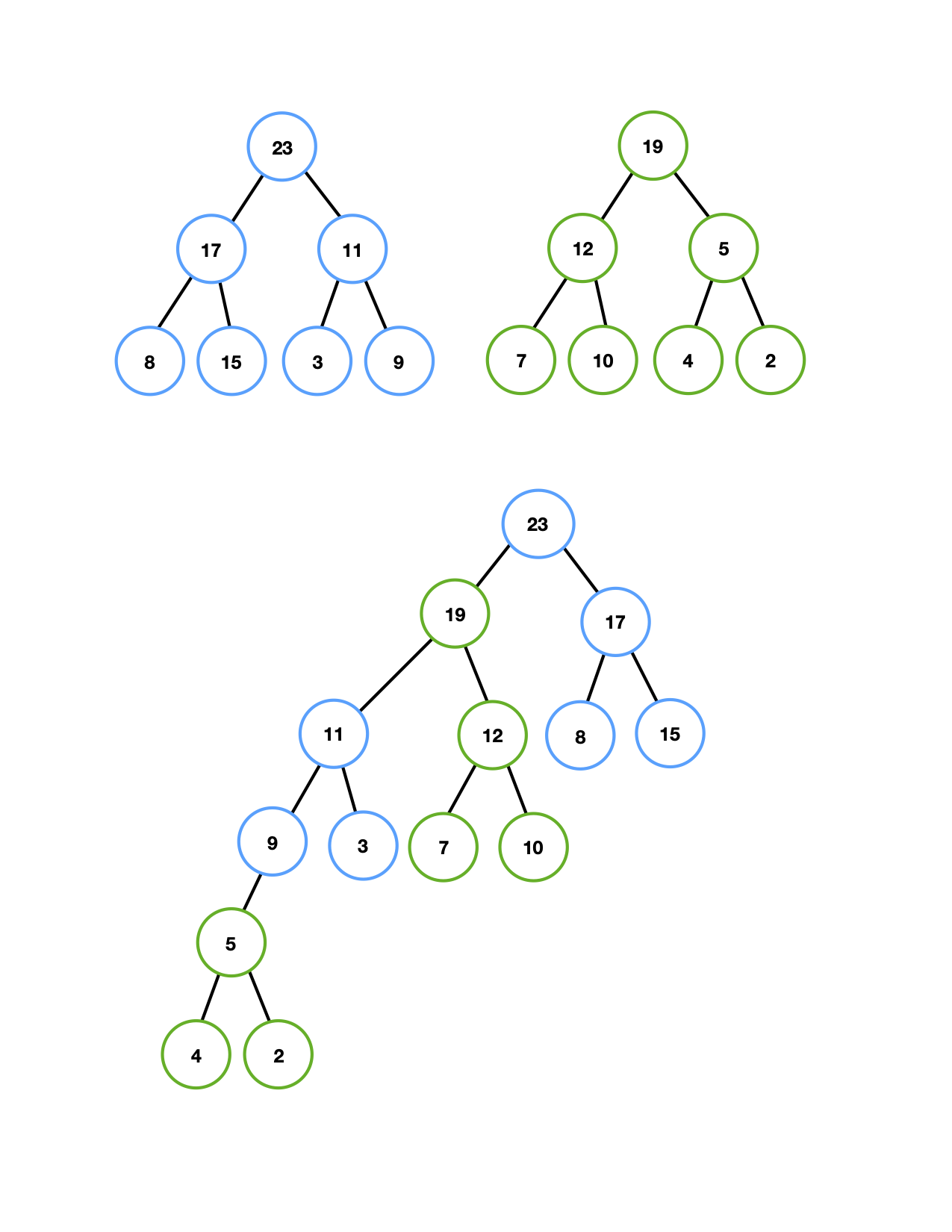
在合并时,递归地将 具有大的根值的堆 与 具有小的根值的堆 的 右子树 合并,如果右子树的 NPL 大于左子树的 NPL,则将两棵子树交互,以满足 leftist heap 的性质要求。
执行合并的时间与右路径的长度成正比,而递归调用时,每一个被访问的结点执行常数工作量,因此合并 leftist heap 的时间界为 \(\mathcal{O}(\log_{}{N})\) 。以下代码展示了合并操作的递归实现,如果你希望使用 loop 进行实现可能会有些困难,但可以肯定的是无论如何实现其结果等价。
BinaryTreeNode* merge_impl(BinaryTreeNode* h1, BinaryTreeNode* h2) {
BinaryTreeNode* merge(BinaryTreeNode* h1, BinaryTreeNode* h2); // 声明 merge 函数
if (h1->left == nullptr) {
h1->left = h2;
return h1;
}
h1->right = merge(h1->right, h2);
if (get_npl(h1->left) < get_npl(h1->right)) {
swap(h1->left, h1->right);
}
set_npl(h1, 1 + get_npl(h1->right));
return h1;
}
BinaryTreeNode* merge(BinaryTreeNode* h1, BinaryTreeNode* h2) {
if (h1 == nullptr) {
return h2;
}
if (h2 == nullptr) {
return h1;
}
return h1->data < h2->data ? merge_impl(h1, h2) : merge_impl(h2, h1);
}斜堆
斜堆 (skew heap) 是 leftist heap 的自调节形式,skew heap 与 leftist heap 的关系类似于 AVL tree 与 splay tree 之间的关系。skew heap 不对树的结构进行限制,右路径可以任意长,因此所有操作的最坏运行时间为 \(\mathcal{O}(N)\) 。但是正如 splay tree,它的 amortized 运行时间为 \(\mathcal{O}(\log_{}{N})\) 。skew heap 的基本操作也是合并,且操作与 leftist heap 是类似的,唯一的不同是 skew heap 不再存储 NPL,交换孩子是无条件的。
BinaryTreeNode* merge_impl(BinaryTreeNode* h1, BinaryTreeNode* h2) {
BinaryTreeNode* merge(BinaryTreeNode* h1, BinaryTreeNode* h2); // 声明 merge 函数
h1->right = merge(h1->right, h2);
swap(h1->left, h1->right);
return h1;
}
BinaryTreeNode* merge(BinaryTreeNode* h1, BinaryTreeNode* h2) {
if (h1 == nullptr) {
return h2;
}
if (h2 == nullptr) {
return h1;
}
return h1->data < h2->data ? merge_impl(h1, h2) : merge_impl(h2, h1);
}二项队列
二项队列不同于前面介绍的所有优先队列的实现,其是堆序的树的集合,称为森林。森林中的每一棵 二项树 (binomial tree) 都是有约束的堆序树,每一个高度上至多存在一棵二项树,高度为 0 的二项树是一颗单结点树;高度为 k 的二项树 \(B_k\) 通过将一棵二项树 \(B_{k-1}\) 附接到另一棵二项树 \(B_{k-1}\) 的根上构成。
高度为 k 的二项树恰好有 \(2^k\) 个结点,而深度 d 处的结点树是二项系数 \[\left(\begin{aligned} k \\ d \end{aligned}\right).\]
如果将堆序施加于二项树上,并允许任意高度上最多一棵二项树,那么能够用二项树的集合唯一地表示任意大小的优先队列。例如,大小为 13 的优先队列可以用森林 \(B_3\) 、\(B_2\) 、\(B_0\) 表示,将这种二项队列写作 \(1101\)。

二项队列操作
最小元可以通过搜索所有树的根找出,最多有 \(\log_{}N\) 棵不同的树,因此最小元可以以 \(\mathcal{O}(\log N)\) 时间找出。若记住当最小元在其他操作期间变化时更新它,那么可以保留最小元的信息并以 \(\mathcal{O}(1)\) 时间执行操作。
合并两个二项队列在概念上很容易,对于两个同高度的二项树可以合并为更高的树,让值大的根成为值小的根的子树。有时合并后,可能出现三棵高度相同的树,在两个队列中各取一棵继续合并即可。直到没有高度相同的树为止,合并结束。

插入可以看作合并的特殊情况,创建一棵单结点树,然后执行合并即可。删除操作由找到具有最小根的二项树来完成,将该树先从森林中移除,删除掉根后,拆解为新的二项队列,最后合并这两个队列即可。
二项队列的实现
为了保证快速合并,可以按高度大小递减的顺序保存这些二项树的根。而二项树的结点,可以像树一样存储,一个儿子指针域,一个兄弟指针域,和一个元素域。
struct BinomialNode {
Comparable element;
BinomialNode* child;
BinomialNode* sibling;
BinomialNode(const Comparable& e, BinomialNode* c, BinomialNode* s)
: element(e), child(c), sibling(s) {}
};
class BinomialQueue {
private:
int size;
vector<BinomialNode*> forest;
public:
BinomialQueue() = default;
};合并两个二项队列的实现,首先需要确定如何合并两棵同高度的树。
BinomialNode* merge_tree(BinomialNode* t1, BinomialNode* t2) {
if (t2->element < t1->element) {
return merge(t2, t1);
}
t2->sibling = t1->child;
t1->child = t2;
return t1;
}对于实现合并操作,在任意时刻,仅处理高度为 i 的那些树,并且始终从高度最低的树开始像最高的树合并。
// 将二项队列 B 合并到 A,并清空 B
void merge(BinomialQueue& a, BinomialQueue& b) {
a.size += b.size;
if (a.size > a.capacity()) {
int old_forest_size = a.forest.size();
int new_forest_size = max(old_forest_size, b.forest.size()) + 1;
a.forest.resize(new_forest_size);
for (int i = old_forest_size; i < new_forest_size; ++i) {
a.forest[i] = nullptr;
}
}
BinomialNode* carry = nullptr;
for (int i = 0, j = 1; j <= a.size; ++i, j *= 2) {
BinomialNode* t1 = a.forest[i];
BinomialNode* t2 = i < b.forest.size() ? b.forest[i] : nullptr;
int which_case = t1 == nullptr ? 0 : 1;
which_case += t2 == nullptr ? 0 : 2;
which_case += carry == nullptr ? 0 : 4;
switch (which_case) {
case 0: { // no tree
[[fallthrough]];
}
case 1: { // only t1
break;
}
case 2: { // only t2
a.forest[i] = t2;
b.forest[i] = nullptr;
break;
}
case 3: { // t1 and t2 exist
carry = merge_tree(t1, t2);
a.forest[i] = b.forest[i] = nullptr;
break;
}
case 4: { // Only carry
a.forest[i] = carry;
carry = nullptr;
break;
}
case 5: { // t1 and carry exist
carry = merge_tree(t1, carry);
a.forest[i] = nullptr;
break;
}
case 6: { // t2 and carry exist
carry = merge_tree(t2, carry);
b.forest[i] = nullptr;
break;
}
case 7: { // all exist
a.forest[i] = carry;
carry = merge_tree(t1, t2);
b.forest[i] = nullptr;
break;
}
}
}
b.forest.clean();
b.size = 0;
}